Motors for Robotics: Do You Really Need to Compromise?
April 19, 2022
Tradeoff 1: Torque Density vs. Size
When calculating the torque requirements for robotic joints, you may run into the first tradeoff: How can you increase the torque in a robotic motor without increasing its size?
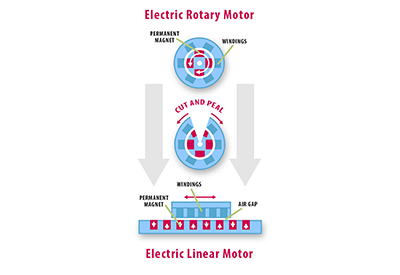
In the frameless motors used in robotic joints, torque increases in direct proportion to an increase in motor length, or as the square of an increase in diameter. In other words, doubling the diameter produces a fourfold increase in torque, known as the D2L rule. In order to achieve the torque required to move and hold substantial loads, the most common approach is to use a larger-diameter robotics motor rather than a longer one, which would make the joint too large and difficult to integrate into your overall design.
But you also run into constraints with a larger-diameter motor. It needs speed and torque ratings that pair well with the harmonic gearing (also known as strain-wave gearing) typically used to keep robotic joints compact and eliminate backlash. But these gearing systems only come in a limited range of off-the-shelf designs. Will a standard motor work in a robotic joint optimized for size, weight and performance? Or will a longer, more costly development cycle be required that only leads to performance compromises?
Tradeoff 2: Velocity vs. Torque
In addition to compact, zero-backlash performance, harmonic gearing systems inherently deliver relatively high gear ratios, typically ranging from a gear reduction of 30:1 to 320:1. The high ratio of a harmonic gearing system has benefits for accelerating/decelerating high inertial loads smoothly and positioning them precisely, but this comes at the expense of speed.
Speed in performing industrial processes is an obvious advantage, so robotics engineers strive to move loads both precisely and quickly. In a robotic joint featuring harmonic gearing, this means using a motor capable of delivering very high input velocity—on the order of 4,000 rpm or more. The problem here is that most frameless motors rapidly lose torque as they approach the upper end of their rated speed range.
When it’s important to maintain adequate torque throughout the speed range required for the application, the tradeoff again becomes performance versus size. Do you choose a motor that’s oversized for the load when operating at its lower-to-middle speed range in order to maintain the torque needed at the higher end of the range? If so, are you willing to design your joints to be larger than would otherwise be ideal? Will you need custom-designed motors or gearing? How many design iterations will be required to achieve robust speed capability combined with consistent torque performance?
Tradeoff 3: Temperature vs. Performance
As Kollmorgen has seen, motors for robotics need sufficient torque and velocity. Combined, you can think of these factors as defining the motor’s overall motion performance. And that performance depends on the motor’s electromagnetic efficiency. All motors waste some electromagnetic energy in the form of heat dissipated from the windings. At a given current, a more efficient motor delivers higher performance and runs cooler, while less efficient one delivers lower performance and runs hotter.
High torque and high speed require the motor to draw higher current, leading to higher temperatures. But when a motor is installed within the close confines of a robotic joint, there are additional considerations. Most motors for robotics are rated at 125ºC to 155ºC maximum winding temperature (ambient temperature + temperature rise). In a collaborative robot application, temperatures that high could pose a safety hazard to humans, and these motors are typically derated accordingly.
But in addition to safety, there’s another problem that’s not as widely understood. Winding temperatures well below 125ºC are still high enough to pose a hazard to gearing and other components. As winding temperature rises above 85ºC, lubricants can degrade, leading to premature gearing wear and possible failure to hold position tolerance. Electronic components, such as encoders and other feedback devices, can become unreliable and burn out prematurely. Every component is interdependent, and when one fails due to excess heat, the robot becomes useless.
So the question becomes, do you derate the motor and slow down your customer’s entire operation? Or do you expect your customer to continuously endure the expense and downtime of replacing failed robotic joints?
In many ways, this is the key tradeoff. It’s possible to avoid destructive temperatures by over-specifying motor performance or derating it. But do size, torque or speed really have to suffer? Isn’t there a better way?

Say No to Tradeoffs
They have been describing the existing state of the market for robotic motors. But now the future has arrived.
After years in research and development, Kollmorgen has created a new generation of frameless motors specifically for the robotics market, designed to eliminate every tradeoff. We are proud to introduce the TBM™2G Series.
- •TBM2G motors are available in standard sizes optimized to pair with off-the-shelf harmonic gearing, minimizing overall joint size while avoiding the need for costly customization.
- •In the shortest and lightest electromagnetics package, TBM2G motors are optimized to meet the velocity and torque requirements of collaborative robots in the 3 to 15 kg category.
- •Featuring an exceptionally short axial length, small outer diameter, and large thru-bore, TBM2G motors simplify the design of sophisticated, next-generation robots.
- •Advanced materials and an innovative winding process deliver consistent performance across a wide range of speed and load requirements.
- •Optional integrated Hall sensors provide commutation feedback without increasing overall motor length.
- •Multiple standard thermal sensor options work with the most popular drives in the robotics market.
- •Designed to deliver outstanding performance without exceeding 85ºC winding temperature, TBM2G motors •help ensure maximum life for lubricants, electronics and other robotic joint components.
One More Tradeoff
In theory, you could have addressed our three tradeoffs by making one big compromise: paying for the development, prototyping and production of a custom motor or gear system design. But with the TBM2G series, you don’t have to do that.
Kollmorgen has highly automated manufacturing processes to produce these next-generation motors at the highest quality on any scale you may require. So you can go to market with confidence. As they like to say, TBM2G motors are fully “Robot Ready.”
Sound intriguing? They would love to tell you more. Talk with a Kollmorgen engineer to learn all about the TBM2G series, designed for the more capable robots that could help you build a more capable business.
![]()